Робособаки успешно справились с контролем хода строительства
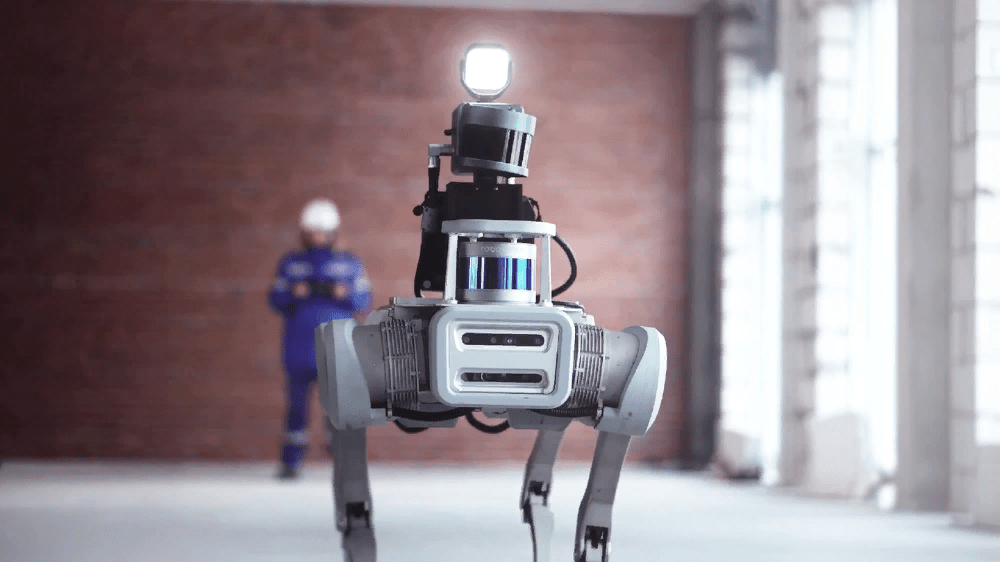
Робособаки под управлением ПО, разработанным 3Logic Group, протестированы в добывающей компании для создания 3D-моделей строящихся объектов.
Завершён пилотный проект по контролю качества строительных работ с использованием четырехопорных роботов в крупной добывающей компании. Робособаки подтвердили свою эффективность в задачах архитектурного надзора и мониторинга соблюдения сроков строительства. 3D-модель строительного объекта при помощи мобильных робоплатформ создана за 12 мин., тогда как геодезисту на это требуется до 72 ч.
В результате заказчик подтвердил успешность пилотного проекта и свою заинтересованность в использовании робоплатформ в строительстве.
Бионический робот под управлением ПО, разработанным 3Logic Group, проходил заданные маршруты в помещениях стройплощадки в Тюмени. На робособаке было установлено сканирующее оборудование весом 2,5 кг. В отличии от колесных платформ робособака свободно перемещалась по помещениям и лестницам, перешагивала через возможные препятствия. Сканирование пространства проводилось непрерывно. На получение 3D-модели объекта площадью 2000 кв м было затрачено 12 мин. Геодезисту высокой квалификации на выполнение этой задачи требуется до 72 ч. При этом отклонения в 3D-модели помещения, полученного с помощью робота, составили не более 2 см.
Применение мобильных четырехопорных роботов возможно в дневное и ночное время. Это особенно важно для строительных объектов, которые возводятся в условиях полярной ночи.
В мониторинге строительства робоплатформы показали высокую точность в измерениях и скорость: «машина» справилась с геодезическими работами в 360 раз быстрее человека. Вместе с заказчиком компания приблизились к созданию решения, которое позволит получить отличный результат и исключить сотрудников из рутинных задач и сохранить их здоровье.
ПО включает алгоритмы машинного обучения, что позволяет совершенствовать выполняемые устройством операции. Сначала робособака проходит необходимый маршрут под управлением человека с помощью приложения (существует версия для ОС Android). В приложении оператор контролирует работу робота: траекторию движения, обход препятствий, прохождение лестниц, необходимые остановки и пр. Затем технологии машинного обучения позволяют роботу ориентироваться на местности автономно и вмешательство оператора уже не требуется.
Источник: Строительные Технологии




















Комментарии